Primitive Scala
A lower level (Scala) solution to this puzzle:
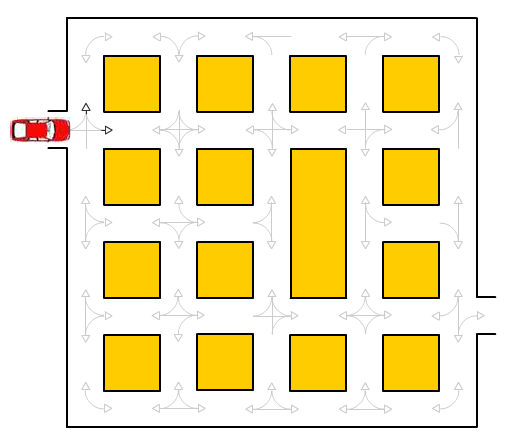
There’s a path from the car to the exit on the right following the lines at corners, and emerging only at arrowheads. This is just a directed graph. The two directions on a street segment are independent nodes. I stole from Daniel Sobral the text representation of the graph, and implemented breadth first (shortest path) search just like he did. The difference is that I explicitly represent the directed graph, and I do so in typical programming contest style. He has a nice ASCII art printout; I just used simple debug prints to verify that I built the graph right.
final case class Roadmap(rows: Int,cols: Int) {
type Onto=Array[Int] // adjacency list
type Roads=Array[Onto] // vertices (unidirectional road segments)
val RC=rows*cols
val ndir=4
val goal=RC*ndir
val DRC=RC*ndir
val roads=new Roads(DRC) // one dimensional array allows for simpler adjacencies at the cost of uglier addressing
/* separate road segment for each direction right left down up (0 1 2 3)
so that (row,col) is the location of the upper/left corner of that segment (be consistent!)
*/
def index(rldu: Int,row: Int, col: Int) = RC*rldu+row*cols+col
def coord(i: Int) = { val rldu=i/RC;val r=i%RC;(rldu,r/cols,r%cols) }
val R=0
val L=1
val D=2
val U=3
val NONE=4
def c2dir(a: Char) = a match {
case ‘R’ => R
case ‘L’ => L
case ‘D’ => D
case ‘U’ => U
case _ => NONE
}
def dir2c(d: Int) = “RLDUN”(d)
def coordname(t: (Int,Int,Int))=t match {case (rldu,row,col) => “%c%d%d”.format(dir2c(rldu),row,col)}
def i2s(i: Int)=coordname(coord(i))
/* set the transitions that meet in the intersection on row r, col c.
exits(dir) if there’s an arrowhead; undir is a list of pairs of linked dirs */
def setCorner(r: Int, c: Int, exits: Array[Boolean], undirs: Array[(Int,Int)], goaldir: Int) {
// remember, r,c gives the upper/left part of road
val froms=Array(index(L,r,c),index(R,r,c-1),index(U,r,c),index(D,r-1,c))
// to approach from the right, you head left. froms and tos are identical except opposite directions
val tos= Array(index(R,r,c),index(L,r,c-1),index(D,r,c),index(U,r-1,c))
val ways= Array.fill(ndir)(new collection.mutable.ArrayBuffer[Int](ndir))
def checkdir(from: Int,to: Int) {
if (goaldir==to) ways(from)+=goal
else if (exits(to)) ways(from)+=tos(to)
}
for ((from,to) checkdir(from,to)
checkdir(to,from)
}
for ((f,w) if (w.size>0) roads(f)=w.toArray
// since we didn’t pad the border, we’ve considered indices that are off the array.
// user input must not ask us to move from somewhere off the array
// a padded border would prevent this, and allow a single start and goal state
}
}
def s2dirs(s: String) = (c2dir(s(0)),c2dir(s(1)))
def readCorner(r: Int, c: Int, desc: String) {
val a=desc.trim split “:”
val exits=new
Array[Boolean](ndir)
var lastdir=NONE
var goaldir=lastdir
for (
c if (c==’!’) goaldir=lastdir
else {
val d=c2dir(c)
if (d!=NONE) {
exits(d)=true
lastdir=d
}
}
}
setCorner(r,c,exits,a(1).trim split ” ” map s2dirs toArray,goaldir)
}
def read(s: String) = {
var r=0
for ((line,row)=0) zipWithIndex) {
for ((s,col) readCorner(row,col,s)
}
}
}
def path2goal(starts: Int*) = {
type Path=List[Int]
val q=new collection.mutable.Queue[Path]
val seen=new Array[Boolean](DRC)
starts foreach (seen(_)=true)
val s=starts map (x=>List(x))
q.enqueue(s: _*)
var p=q.head
while (p.head != goal) {
val
h=p.head
seen(h)=true
val n=roads(h) map (_::p)
q enqueue (n: _*)
p=q dequeue
}
p
}
def prettypath(p: List[Int]) = p reverseMap i2s
} object car {
/* from http://dcsobral.blogspot.com/2009/09/puzzle.html */
val graphString = “”“|
|DR: DR, RLD: RD LD, L: DL LR, LR: DR LR, DL: DL
|UR: LU RU DU LR, LRD: LR UD LU RU LD RD, UDLR: UD LR UR LD, UDLR: UD LR RD, UL: UD UL
|UDR: UD RU RD, UDLR: LR LD DR RU, UD: UD UL DL, UDR: UD UR, UD: UD LD
|UDR: UD RU RD, UDLR: UR UL LR RD, UR: UD LR LU RU DR, ULR: LR UR UL DR DL, UDLR!: UD UL DR
|UR: UR, ULR: UL UR LR, ULR: UL UR RL, ULR: UL UR RL, UL: UL
|”“”.stripMargin
def main(args: Array[String]) {
val r=Roadmap(5,5)
r.read(graphString)
println(r.prettypath(r.path2goal(r.index(r.R,1,0),r.index(r.U,0,0))))
}
}
The format is explained on Daniel’s blog, but I found it odd enough that I’ll mention that it’s a matrix of intersections with EXITS: UNDIRECTED_ADJACENCIES. EXITS is the list of directions that have a departing arrowhead. The adjacencies are undirected to save typing (UR means both UR and RU). I added a ! following the arrowhead if it leads to the goal, since I didn’t want to hard code the exit location.
(SPOILER: R10, R11, D12, D22, R32, U23, U13, U03, R03, D04, L13, D13, R23, D24, D34, L43, L42, L41, L40, U30, U20, R20, D21, L30, D30, R40, R41, R42, R43, U34, where 32 means the road segment with its upper left at row 3 and column 2)